
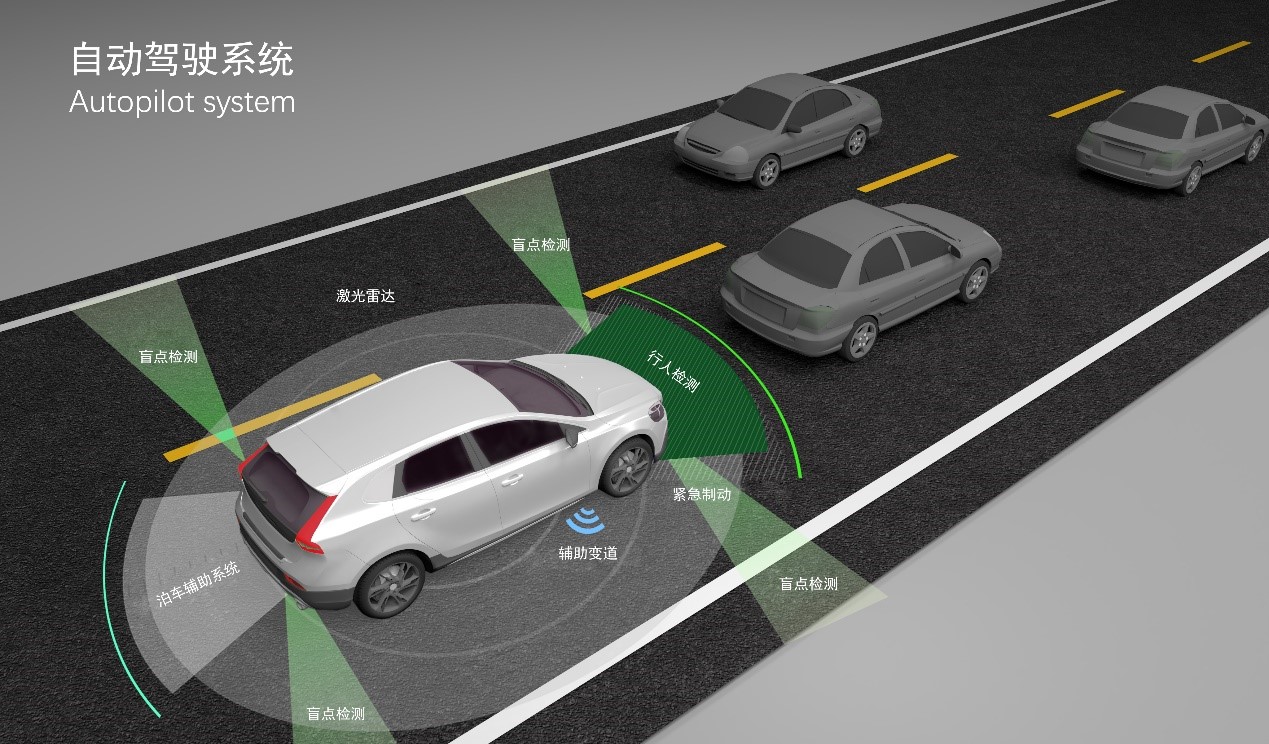
汽車自動駕駛技術包括視頻攝像頭、雷達傳感器以及激光測距器來了解周圍的交通狀況,并通過(guò)一個詳盡的地圖(通過(guò)有人駕駛汽車采集的地圖)對(duì)前方的道(dào)路進(jìn)行導航。自動駕駛技術從業務流程上分爲3個核心的流程,分别是環境感知定位、決策規劃、執行控制。其中環境感知定位是前提:主要通過(guò)傳感器技術和攝像頭、GPS等技術獲取汽車行駛過(guò)程中的環境指标,并且將(jiāng)數據采集。當今的半自動駕駛系統采用了各種(zhǒng)各樣(yàng)數量和設計的雷達和攝像頭系統包括攝像頭、激光雷達、毫米波雷達等技術。
自動駕駛使用4~5個2K(2048*1152)的攝像頭,頻率達到120Hz,單個攝像頭帶寬可達到:2048*1152*120*32bit(RGB)= 1GB/s。整體車載5個攝像頭基本要滿足5GB/s的數據傳輸帶寬。加上多個激光雷達,毫米波雷達的數據傳輸,自動駕駛需要更高的數據傳輸帶寬和實時數據處理能(néng)力。
公司車載記錄設備支持10Gbps 的數據速率,支持多條并行數據的傳輸,足夠滿足自動駕駛車載數據采集系統的數據管理和存儲功能(néng)。
